Fun Projects for your LEGO® MINDSTORMS® NXT!
|
|
Fun Projects for your LEGO® MINDSTORMS® NXT! |
| Spinner Bot |
|
![]()
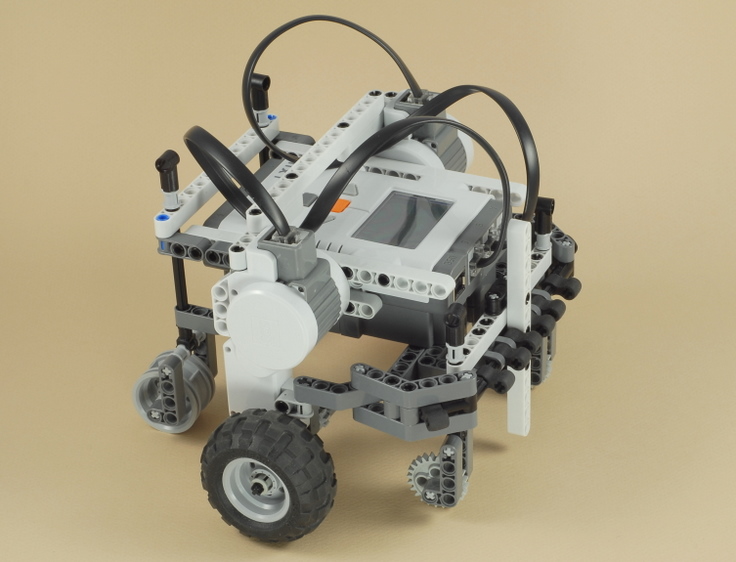
| This robot goes fast and turns even faster, executing
super fast spin turns in place. Although the robot has six wheels,
it is essentially perfect balanced over the two drive wheels in the
center of each side, and the four castor wheels at the corners barely
touch the ground, except when needed to keep the robot from tipping over
during rapid changes in speed or direction. This balanced design
makes the robot turn very easily. The program provided for this robot makes the robot cruise quickly around the room, bumping into things with its rubber bumper, and then it uses the rotation sensors in the motors to detect when the robot has run into something (by detecting when the motors stall or partially stall). This allows it to know when to back up and change direction without using any other sensors. |
|
|
|
Copyright
©
2007-2011 by Dave Parker. All rights reserved. |